Milestone II
For our second milestone, we wanted to start implementing the 4 key
functions we plan on integrating onto the robot.
The 3 functions are the following:
Audio Processing
While we could transcribe what was being said in milestone 1, we didn't know who was saying it. In milestone 2, we implemented a voice classifier from scratch, doing our own data collection, and implementing a TensorFlow convolutional neural network, to differentiate users.
For data collection, we took recordings of each of us reading several standardized passages of text from the University of York. We used these passages because they were written to have a good balance of all possible English phonemes, or the individual sounds we say when we speak. We hoped that standardizing our script for recording training data would make our model less biased, and that saying a diverse and balanced set of sounds would make the model more robust. Our final data set is madeup of over 600, 3 second audio clips.
To analyze the audio signals, we converted them into spectrograms, a visual representation of a signal made from short time fourier transforms where frequency is on the vertical axis, time on the horizontal, and magnitude of the frequency is represented by color or brightness. We then passed the spectrograms into our model made up of four convolution and max-pooling layers, a flatten layer, two dropout layers, a 128 node dense layer, and a four node softmax layer.
To optimize our classifier we made use of dropout layers and plotted loss over epochs. Drop out layers are only active when training a model, and randomly exclude individual nodes during different epochs. They need to be given a dropout probability which determines the number of nodes set to 0. This results in information loss, which when implemented during training helps to prevent over fitting. When plotting loss over epochs we looked for the epoch at which loss began increasing and stopped training there.
For the final product we needed to integrate speech-to-text with our voice classifier. To do so, the speech-to-text recognizer is continuously running and listening for keywords. When "hey" is recognized, the robot assistant audibly replies "listening" to alert the user that a 3 second clip is being recorded. From this clip, the user is classified and it is parsed for a command. The clip is parsed for "forward", "backward", "left", and "right", which either drives or turns the robot in that direction, or "set" making the robot's current position its home, or "cup" which has the robot retrieve the classified person's cup and bring it back home. If the word "off" is recognized, then the robot stops listening for commands.
AprilTag Navigation
While identifying objects on their own is useful, the objects we'd be detecting would be quite small, making them difficult to identify from a distance. To solve this, the objects are placed in a designated "Item Pickup" area, which is identified by an AprilTag. AprilTags are a type of fiducial marker which can be used as a point of reference within the robot's field of view. By leveraging the python AprilTag Library, we can access information about AprilTags visible to the camera, such as their associated numerical ID, position in the frame, and orientation.
Object Tracking
In the previous milestone, we were able to successfully identify 6 different objects with bounding boxes when given a frame. For our purpose, however, simply identifying objects is not sufficient. If there is only one object per category, we could simply track using the name of the object. Ex: "Navigate towards the cup." Realistically, there will be more than one object per category present in the loading area. Ex: 3 cups & 2 scissors. In this case, the command "Navigate towards the cup" won't work since the robot cannot differentiate the 3 cups apart like humans do. In order to resolve this issue, we use SORT (Simple Online Realtime Tracking).
What is SORT?
Let \(B_{detection}\) represent all the bounding boxes containing different objects that are identified by YOLO. During the feature extraction process, SORT uses the target's size and past movement from time \(t-1\) (equation 1). \((x,y)\) is the target's center, \(s\) is size, \(r\) is the height to width ratio (fixed). \(\dot{x}, \dot{y}, \dot{s}\) represent the previous movement performed by the target. SORT then uses this information to predict the target's location at time \(t\). The predictions are stored in \(B_{prediction}\).
\(b=(x,y,s,r, \dot{x}, \dot{y}, \dot{s})\) Equation 1
Then, the IOU (Intersection Over Union) of \(B_{detection}\) and \(B_{prediction}\) is calculated and converted to distance by subtracting it from 1. These distances are then stored in a matrix. If the number of boxes in \(B_{detection}\) and \(B_{prediction}\) are different, placeholder boxes are added to the smaller set to ensure both matrices are square. The placeholder boxes have a large distance value to prevent matching with real boxes. A distance matrix example is shown below.
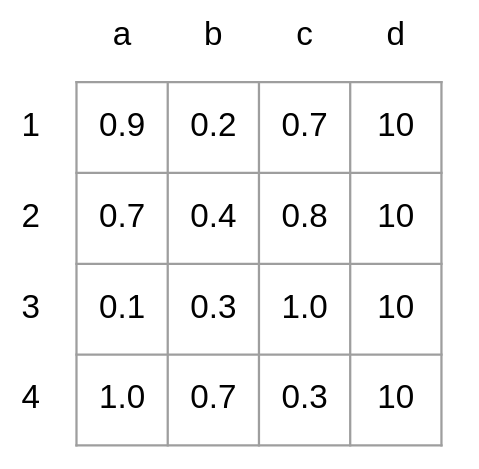
Fig 1: Example distance matrix calculated using \(B_{detection} = [1,2,3,4]\) and \(B_{predicted} = [a,b,c]\). A placeholder box \(d\) has been added to \(B_{predicted}\) to form a square matrix.
With the distance matrix, SORT now applies the Hungarian Algorithm to find the best-matching pairs. The Hungarian Algorithm is an optimization algorithm that assigns 'tasks' to 'workers' to minimize the 'cost.' For example, when assigning tasks (a-c) to workers (1-3) given the cost matrix below (Fig 2), the pairs 1-c, 2-a, 3-b would minimize the cost.
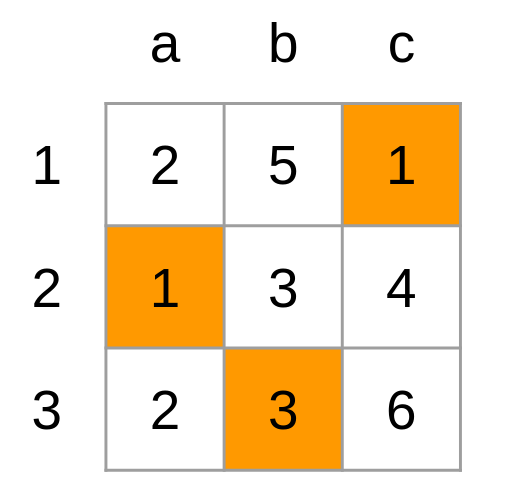
Fig 2: Example of the Hungarian Algorithm, the highlighted cells represent the pairings that minimize the cost.
With this in mind, finding best-matching pairs using the distance matrix (Fig 1) becomes an optimization problem for assigning boxes from \(B_{predicted}\) (task) to \(B_{detected}\) (workers) to minimize the distances (cost).
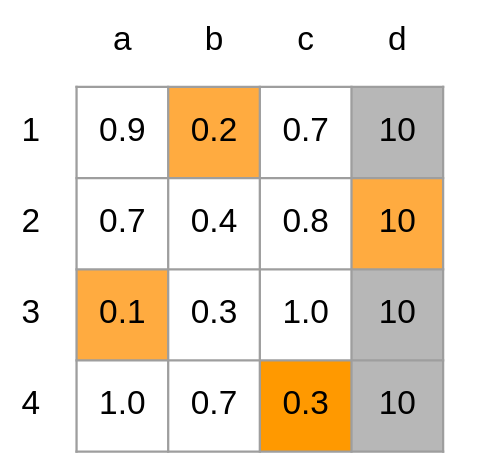
Fig 3: Result of applying the Hungarian Algorithm to the distance matrix. The best-matching pairs are 1-b, 2-d, 3-a, and 4-c. Since column d was added for the sake of making the matrix square, the 2-d pairing gets thrown out.
Once SORT finishes all the steps described above, it moves onto the next frame after post-processing. During post-processing, the \(b\) values (equation 1) of each target in \(B_{predicted}\) gets updated depending on if they have been matched. For targets with a match, their \(x,y,s,r\) is replaced with those of their matching pairs, and their \(\dot{x}, \dot{y}, \dot{s}\) is updated using a Kalman Filter. For targets without a match, their \(x,y,s\) is updated by adding \(\dot{x}, \dot{y}, \dot{s}\). For boxes in \(B_{detected}\) without a match, they are considered new objects and their b values are initialized with \(\dot{x}=0, \dot{y}=0, \dot{s}=0\). The new boxes are added to \(B_{predicted}\).
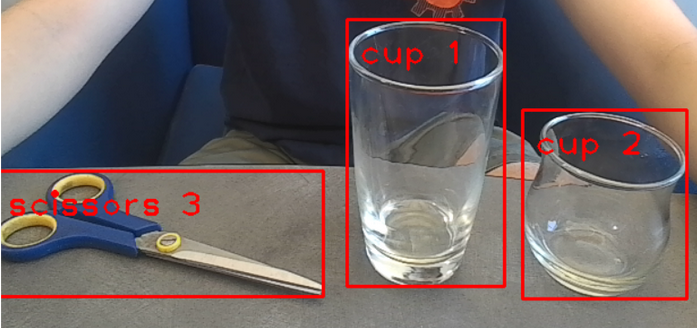
Fig 4: Result of applying SORT to an image. Each object is assigned to unique IDs. This ID will be used to determine which object the robot should be navigating towards..
Fig 5. Demonstration of applying SORT on a given frame. The cup being tracked is indicated with a red dot at its center. Notice how the cup being tracked does not change.